Parallele Achsen: Version Pendelantrieb

Allgemeines
Ebene Oszillatoren sind Nockenmechanismen, die eine gleichmäßig drehende Bewegung der Eingangswelle (Antrieb) in eine intermittierende, unidirektionale Bewegung der Ausgangswelle (Abtrieb) in eine Richtung umwandelt; sie sind dadurch gekennzeichnet, dass Ein- und Ausgangswelle parallel zueinander stehen.
Die Bewegungsübertragung erfolgt über ein an der Eingangswelle aufgeschrumpftes Nockenpaar mit zusammenarbeitenden Profilen, das durch einen Rollentaster an der Ausgangswelle erfasst wird. Die Profile sind so beschaffen, dass jederzeit wenigstens zwei einander entgegengesetzte Rollen stets Kontakt habe. Das gewährleistet die Spielfreiheit in der Übertragung, höhere Präzision und Wiederholbarkeit der Indexierung, geräusch- und vibrationsarmen Lauf und entsprechend geringeren Verschleiß.
Das Schrittgetriebe hat ein staub- und wasserdichtes Gehäuse aus Gusseisen, das an allen Flächen bearbeitet ist und seinen Einbau in allen Positionen erlaubt. Getriebe und Getriebemotoren können direkt montiert werden. Zusätzliche Befestigungsbohrungen können an den die Ein- und Ausgangswellen enthaltenden Flächen ausgeführt werden, wodurch Befestigungszugstangen vermieden werden. Durch Umschaltung des Drehsinns der Eingangswelle wird auch der Drehsinn der Ausgangswelle umgeschaltet, bei gleichbleibenden kinematischen Merkmalen der Bewegung. Auf Anfrage ist eine Sonderanfertigung mit Pendelbewegung der Ausgangswelle lieferbar.
Das Produkt ist dauergeschmiert und somit wartungsfrei.
Projektparameter
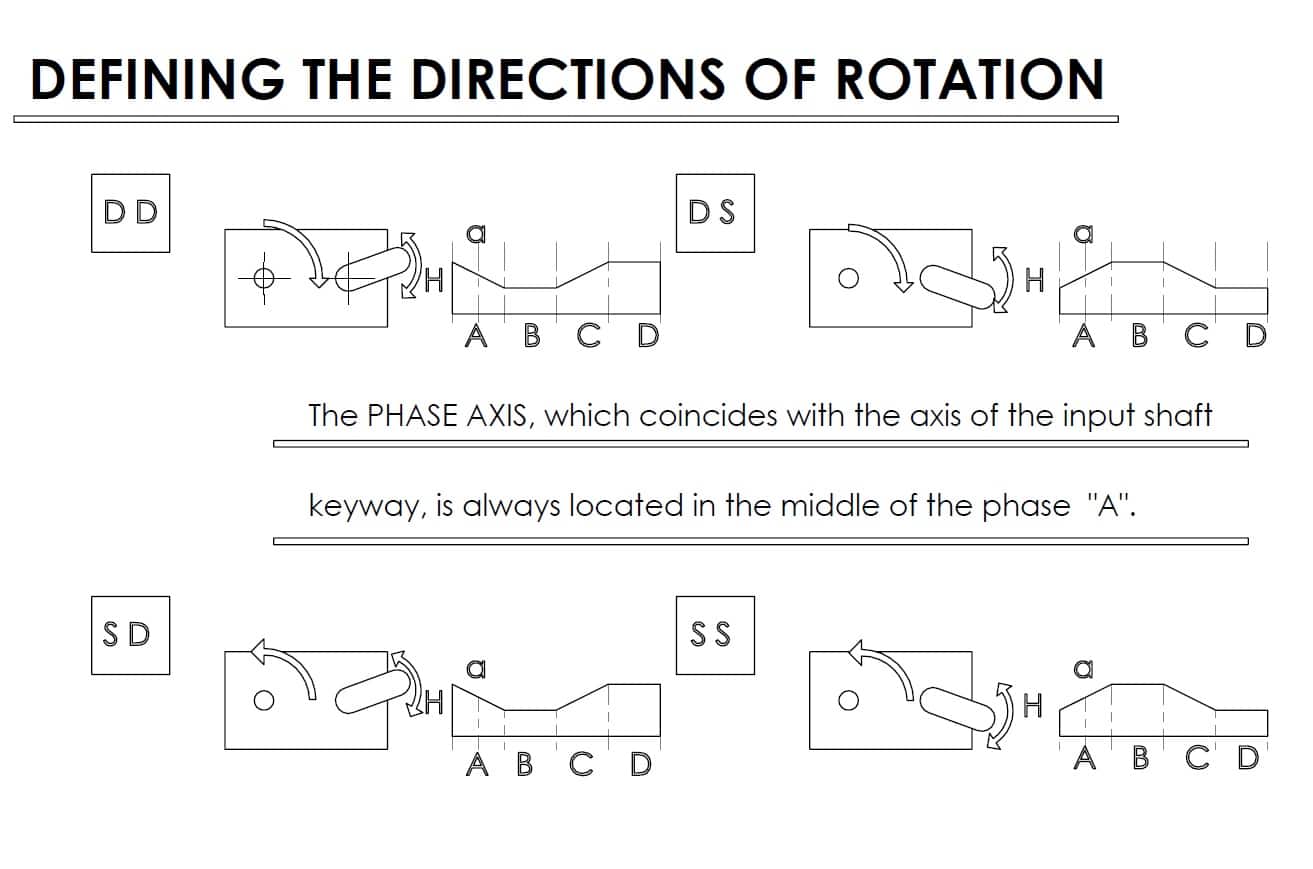
Bei den Oszillatoren mit Parallelachsen entsprechen jedem Zyklus der Eingangswellezwei gleiche und gegenläufige Schwingungen (mit oder ohne Pausezeiten) der Ausgangswelle. Zur Identifikation eines Schrittgetriebes sind daher folgende Parameter erforderlich:
- Abstand (I)
- Winkelweg (H)
- Winkelamplitude Vorlaufphase (A)
- Winkelamplitude derRastphase (B)
- Winkelamplitude der Rücklaufphase (C)
- Winkelamplitude der Rastphase (D)
Standard-Bewegungsgesetze
Dank der vieljährigen Erfahrung von ITALCAMME in Sachen Nocken für automatische Maschinen werden für ihre Mechanismen jene BEWEGUNGSGESETZE angewendet, die den besten Kompromiss zwischen den kinematischen und den dynamischen Eigenschaften darstellen.
Die normierten BEWEGUNGSGESETZE weisen kontinuierliche Beschleunigungs- und Geschwindigkeitskurven auf, die mit der mit der Hälfte der Bewegung zusammenfallenden Symmetrieachse symmetrisch sind; die Anfangs- und Endwerte von Geschwindigkeit und Beschleunigung sind gleich Null. Jedes Gesetz zeichnet sich durch eigene Geschwindigkeitsfaktoren (Cv) und Beschleunigungsfaktoren (Ca) aus, die jeweils die maximale Geschwindigkeit und maximale Beschleunigung für eine in einer Zeiteinheit ausgeführte Standardbewegung darstellen.
In der Regel kommen folgende Bewegungsgesetze zur Anwendung:
Zykloidkurve (Cv=2, Ca=6.28)
Diese Kurve ist auch als Sinuskurve bekannt. Sie hat unter den normierten Kurven den höchsten Spitzen-Beschleunigungswert, aber den sanftesten Übergang zwischen der Beschleunigung Null und der Maximalbeschleunigung.
Cicloidale modificata (Cv=1.76, Ca=5.53)
Diese Kurve ergibt sich aus der Kombination der Sinus- und der Kosinus-Beschleunigungskurve. Ihr Hauptmerkmal ist jenes des unter allen Normkurven sanftesten Übergangs zwischen der maximalen Beschleunigung und der maximalen Verlangsamung. Auch als modifizierte Sinuskurve bekannt.
Modifizierte Trapezkurve (Cv=2, Ca=4.89)
Diese Kurve ergibt sich aus der Kombination der Sinus-Beschleunigungskurve und der konstanten Beschleunigungskurve. Ihr Hauptmerkmal ist jenes der unter den Normkurven niedrigsten Maximalbeschleunigung.
Modifizierte Sinuskurve mit Strecke mit konstanter Geschwindigkeit (Cv=1.4, Ca=6.62)
Diese Kurve ist eine Verarbeitung der modifizierten Zykloidkurve. Die Einfügung einer Strecke mit konstanter Geschwindigkeit und Beschleunigung Null am mittleren Punkt der Beschleunigungskurve reduziert die Höchstgeschwindigkeit und macht sie geeignet für Anwendungen mit langen Hüben. Es handelt sich um den Prototyp einer Familie abgeleiteter Kurven, die sich durch geringfügig unterschiedliche Geschwindigkeits- und Beschleunigungsfaktoren unterscheiden. Sie kommen in Sonderfällen zum Einsatz, wenn sie im Vergleich zu den Standard-Normkurven Vorteile mit sich bringen.
Nehmen Sie mit der technischen Abteilung von ITALCAMME Kontakt auf, es können spezielle Winkel und Bewegungsgesetze für besondere Anforderungen geplant werden.
Normale Version (VSS)

