Parallel Oscillators

Introduction
Flat indexers are cam mechanisms designed to convert the uniform rotating motion of the input shaft (input) to intermittent motion of the output shaft (output). These mechanisms are characterized by having parallel input and output shafts.
Motion is transmitted by a pair of conjungated-contour cams keyed to the input shaft and coupled with a roller detector on the output shaft. Cam profiles are designed to have always two opposite rollers in contact (one for each cam) in order to take up the slack: with consequent improvement in precision and repeatability of positioning, in decreasing noise and vibrations and in reducing wear. Intermittent - oscillating drives are contained in airtight - cast iron boxes. All surfaces present machined planes and threaded mounting holes.
The mechanism doesn’t need scheduled maintenance because it is used a long life lubricating grease.
Project parameters
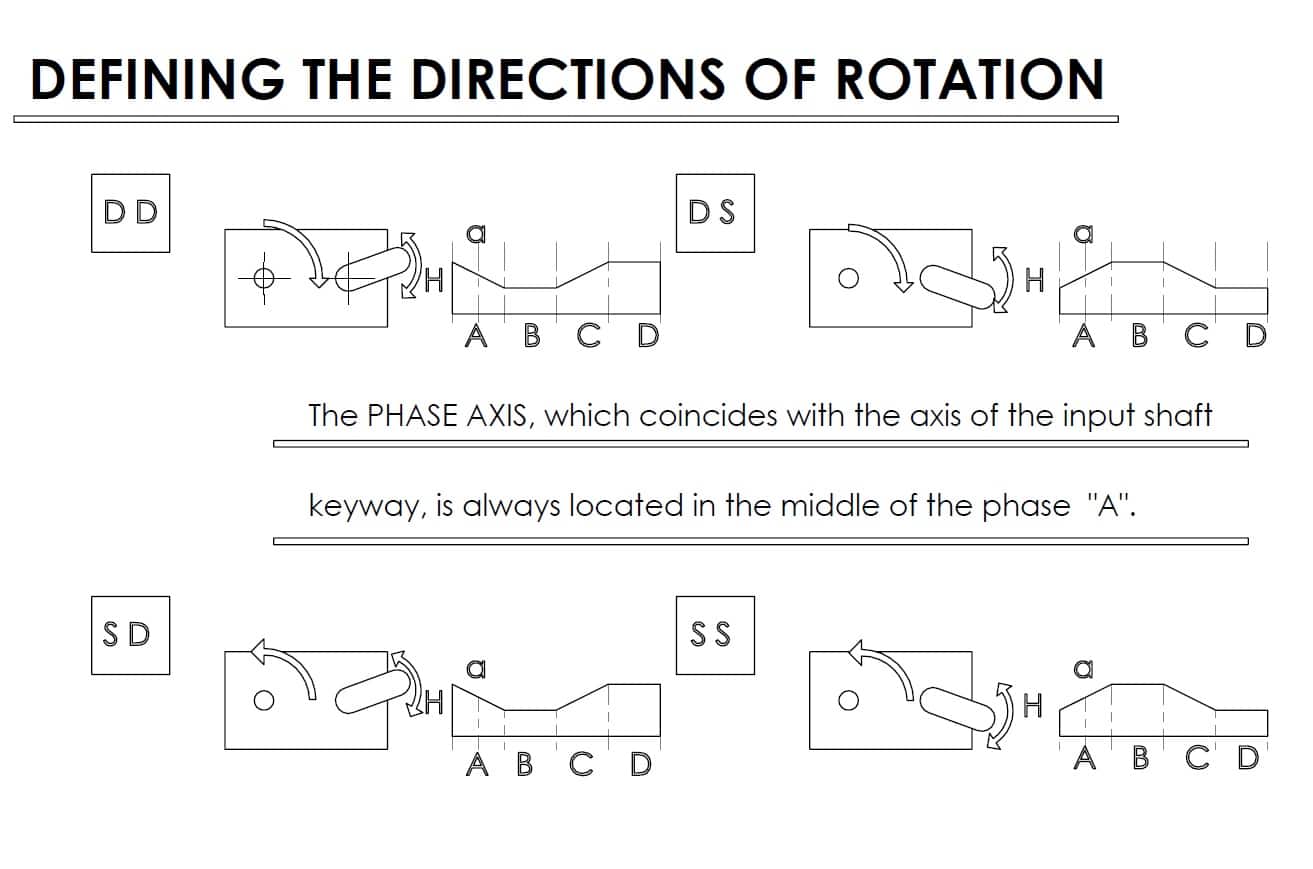
Every cycle of oscillating drives input shaft produces two equal and opposite oscillations (with or without periods of stops) of the output shaft. Parameters required for identifying an oscillating drive are:angular stroke (H) angular amplitude of the rise phase (A) angular amplitude of the dwell phase (B) angular amplitude of the return phase (C) angular amplitude of the dwell phase (D) As for intermittent drives, the WHEELBASE (I) represents the distance between input and output shaft, and measures the mechanism dimensions.ANGULAR STROKE (H) is the amplitude of the oscillation of the follower.The ANGULAR AMPLITUDES are the rotations done by the input shaft while the output executes: rise (A), possible stop (B), return (C) and another possible stop phase (D). Obviously it should be: A+B+C+D = 360 °Input and output shafts are equipped with key-housing, which can be used to refer to set point. Keys are aligned (PHASE AXE) while the oscillating drive is in the middle of the rise phase (A).When ordering it is important to specify, in relation to the input shaft direction of rotation (clockwise or counterclockwise), whether the rise (A) has to be clockwise or counterclockwise.
Standard laws of motion
Long term experience in the field of cams has led ITALCAMME to the development of LAWS OF MOTION for the produced mechanisms, which represent the best kinematic and dynamic properties.
The standardized LAWS OF MOTION are characterized by continuous acceleration curves, without sharp variations at any point during the movement, those are symmetrical, with the axis of symmetry coinciding with the mid-point of the movement; initial and final speed and acceleration values are zero.
Each law is distinguished by its own speed (Cv) and acceleration (Ca) coefficients, which respectively represent the maximum speed and acceleration for a unit displacement implemented in the unit of time. The laws of motion normally used are the following:
Cycloidal (Cv=2, Ca=6.28)
This curve is also known as a sinusoidal curve. Among the standardized curves, this one has the highest maximum acceleration value, but it also has the smoothest passage from zero acceleration to full acceleration.
Modified cycloidal (Cv=1.76, Ca=5.53)
This curve is obtained by the combination of the sinusoidal acceleration curve and cosinusoidal acceleration curve. Its main characteristic is that it features, among the standardized curves, the smoothest passage between maximum acceleration and maximum deceleration values. It’s also known as Modified Sinusoidal.
Modified trapezoidal (Cv=2, Ca=4.89)
This curve is obtained from the combination of the sinusoidal acceleration curve and constant acceleration curve. Its main characteristic is that, among the standardized curves, it has the lowest maximum acceleration.
Modified sinusoidal with section at constant speed (Cv=1.4, Ca=6.62)
This curve is obtained from the modified cycloidal curve. The introduction of a section with constant speed and zero acceleration at the middle point of the acceleration curve reduces maximum speed and makes this curve especially suitable for applications with long strokes. This curve is the prototype of a family of derived curves, differentiated by their slightly different acceleration and speed coefficient values, which are applied in specific cases, where they are more advantageous than standard normalized curves.
Contacting the technical department ITALCAMME, you can design angles and special laws of motion according to the specific application needs.
Standard Version (VSS)

