Rundschalttische: Version Pendelantrieb

Allgemeines
Die DREHTISCHE in der SCHWENKAUSFÜHRUNG sind Nockenmechanismen, die die gleichmäßige Drehbewegung der Eingangswelle (Antrieb) in eine intermittierende Schwenkbewegung der Ausgangswelle (Abtrieb) umwandeln kann. Dies erfolgt mit zwei senkrecht zueinander stehenden Wellen.
Die Bewegungsübertragung erfolgt durch einen, auf die Eingangswelle aufgepressten Zylindernocken, der mit einer, auf die Ausgangswelle aufgepresste Teilvorrichtung, gekuppelt ist. In der Teilvorrichtung sind eine, je nach Austauschwinkel und Anzahl Stationen variable Anzahl Leerlaufzapfen in gleichem Abstand voneinander montiert.
Während allen Betriebsphasen berühren sich immer mindestens zwei, auf der Nockenscheibe vorgespannte Leerlaufzapfen, wodurch eine spielfreie Übertragung mit einer verbesserten Präzision und Wiederholbarkeit der Positionierung, niedrigerem Lärmpegel und geringerer Vibrationen und folglich weniger Verschleiß gewährleistet sind.
Der Drehtisch ist in einem gusseisernen Gehäuse wasserdicht verschlossen. Alle Oberflächen sind bearbeitet und bieten die Möglichkeit, den Mechanismus in allen Positionen zu montieren, was auch eine direkte Montage von Untersetzungsgetrieben und Getriebemotoren erlaubt.
Zusätzliche Befestigungslöcher können in den Flächen mit den Eingangs- und Ausgangswellen angebracht und dadurch Montagezugstangen vermieden werden.
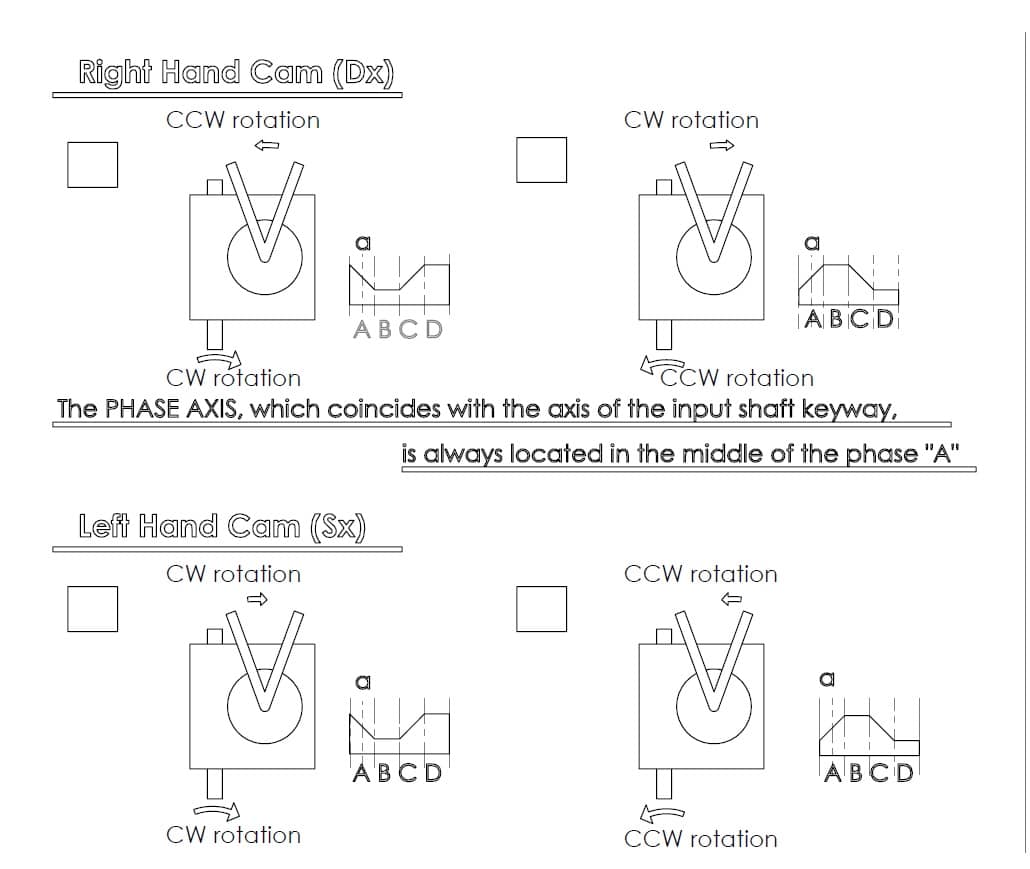
Mit der Drehrichtungsumkehr der Eingangswelle erfolgt die Drehrichtungsumkehr der Ausgangswelle ohne die kinematischen Eigenschaften der Bewegung zu verändern.
Die Gruppe ist mit Dauerschmierung ausgerüstet und dadurch wartungsfrei.
Planungsarameter der Drehtische
Standard-Bewegungsgesetze
Dank der vieljährigen Erfahrung von ITALCAMME in Sachen Nocken für automatische Maschinen werden für ihre Mechanismen jene BEWEGUNGSGESETZE angewendet, die den besten Kompromiss zwischen den kinematischen und den dynamischen Eigenschaften darstellen.
Die normierten BEWEGUNGSGESETZE weisen kontinuierliche Beschleunigungs- und Geschwindigkeitskurven auf, die mit der mit der Hälfte der Bewegung zusammenfallenden Symmetrieachse symmetrisch sind; die Anfangs- und Endwerte von Geschwindigkeit und Beschleunigung sind gleich Null. Jedes Gesetz zeichnet sich durch eigene Geschwindigkeitsfaktoren (Cv) und Beschleunigungsfaktoren (Ca) aus, die jeweils die maximale Geschwindigkeit und maximale Beschleunigung für eine in einer Zeiteinheit ausgeführte Standardbewegung darstellen.
In der Regel kommen folgende Bewegungsgesetze zur Anwendung:
Zykloidkurve (Cv=2, Ca=6.28)
Diese Kurve ist auch als Sinuskurve bekannt. Sie hat unter den normierten Kurven den höchsten Spitzen-Beschleunigungswert, aber den sanftesten Übergang zwischen der Beschleunigung Null und der Maximalbeschleunigung.
Cicloidale modificata (Cv=1.76, Ca=5.53)
Diese Kurve ergibt sich aus der Kombination der Sinus- und der Kosinus-Beschleunigungskurve. Ihr Hauptmerkmal ist jenes des unter allen Normkurven sanftesten Übergangs zwischen der maximalen Beschleunigung und der maximalen Verlangsamung. Auch als modifizierte Sinuskurve bekannt.
Modifizierte Trapezkurve (Cv=2, Ca=4.89)
Diese Kurve ergibt sich aus der Kombination der Sinus-Beschleunigungskurve und der konstanten Beschleunigungskurve. Ihr Hauptmerkmal ist jenes der unter den Normkurven niedrigsten Maximalbeschleunigung.
Modifizierte Sinuskurve mit Strecke mit konstanter Geschwindigkeit (Cv=1.4, Ca=6.62)
Diese Kurve ist eine Verarbeitung der modifizierten Zykloidkurve. Die Einfügung einer Strecke mit konstanter Geschwindigkeit und Beschleunigung Null am mittleren Punkt der Beschleunigungskurve reduziert die Höchstgeschwindigkeit und macht sie geeignet für Anwendungen mit langen Hüben. Es handelt sich um den Prototyp einer Familie abgeleiteter Kurven, die sich durch geringfügig unterschiedliche Geschwindigkeits- und Beschleunigungsfaktoren unterscheiden. Sie kommen in Sonderfällen zum Einsatz, wenn sie im Vergleich zu den Standard-Normkurven Vorteile mit sich bringen.
Nehmen Sie mit der technischen Abteilung von ITALCAMME Kontakt auf, es können spezielle Winkel und Bewegungsgesetze für besondere Anforderungen geplant werden.
Erhältliche Kombinationen:
| Angolo di oscillazione [°] | Spostamento (A) [°] | Sosta (B) [°] | Spostamento (C) [°] | Sosta (D) | hf:att:pa_angolo-di-oscillazione |
|---|---|---|---|---|---|
| 30 | 150 | 60 | 150 | 0 | 30-de |
| 30 | 150 | 30 | 150 | 30 | 30-de |
| 45 | 75 | 105 | 75 | 105 | 45-de |
| 45 | 150 | 30 | 150 | 30 | 45-de |
Es können andere Winkel als die angegebenen entsprechend den spezifischen Anwendungsanforderungen geplant werden; wenden Sie sich an unsere technische Abteilung.
Normale Version (VSS)

